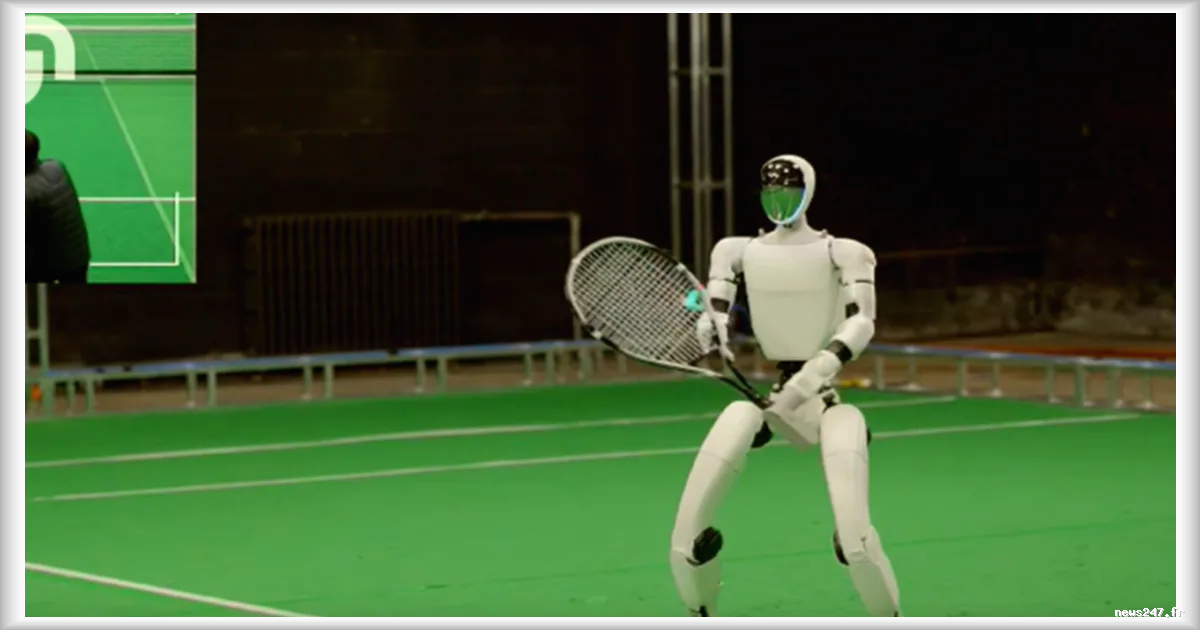
D'après nos confrères de Numerama, les robots humanoïdes sont de plus en plus présents dans différents domaines, allant des tâches ménagères au sport. Un exemple récent est le projet LATENT, mené par l'université Tsinghua, qui permet à un robot humanoïde de jouer au tennis avec une précision impressionnante. Ce projet a été rendu possible grâce à une méthode d'entraînement innovante qui utilise des données de motion capture humaine pour enseigner au robot les mouvements nécessaires pour jouer au tennis.
Le robot en question est le G1 d'Unitree, un humanoïde « généraliste » conçu pour la recherche et le développement en intelligence artificielle et en robotique. Avec une hauteur de 1,30 m et un poids d'environ 35 kg, le G1 est déjà commercialisé à l'international et bénéficie d'une forte visibilité médiatique. Selon les présentations publiques du projet, le G1 a appris à jouer au tennis en seulement cinq heures de motion capture humaine, ce qui constitue un véritable exploit.
Ce qu'il faut retenir
- Le projet LATENT permet à un robot humanoïde de jouer au tennis avec précision grâce à des données de motion capture humaine.
- Le robot G1 d'Unitree a appris à jouer au tennis en seulement cinq heures de motion capture humaine.
- La méthode d'entraînement utilise des « compétences primitives » pour enseigner au robot les mouvements nécessaires pour jouer au tennis.
- Le système atteint jusqu'à 90,9 % de réussite en coup droit pour renvoyer la balle vers une zone cible.
La méthode d'entraînement
La méthode d'entraînement utilisée dans le projet LATENT est basée sur l'apprentissage de « compétences primitives » à partir de données humaines imparfaites. Les chercheurs ont collecté des données de motion capture de joueurs humains, mais au lieu d'utiliser des matchs complets, ils ont utilisé des fragments de mouvement qui capturent des compétences spécifiques telles que les coups droits, les revers, les déplacements latéraux, etc. Ces séquences sont quasi réalistes, mais loin d'être parfaites, ce qui permet de collecter des données plus rapidement et de manière plus simple.
Une fois ces « compétences primitives » apprises, les chercheurs ajoutent une deuxième couche d'IA chargée de décider, en temps réel, quel mouvement doit être exécuté selon la trajectoire de la balle. Le robot observe la position et la vitesse de la balle, choisit un déplacement, puis sélectionne et ajuste un geste de frappe issu de son répertoire pour viser une zone précise du court. Cette stratégie est d'abord entraînée dans un simulateur physique, où le robot virtuel est soumis à des centaines de scénarios avec des vitesses, des rebonds et des erreurs de capteurs différents.
Les résultats
Les résultats du projet LATENT sont impressionnants, avec un taux de réussite de 90,9 % en coup droit pour renvoyer la balle vers une zone cible. Le robot est capable de renvoyer des balles allant jusqu'à 15 m/s, ce qui constitue un exploit considérable. Les chercheurs évaluent la performance de leur méthode en mesurant le pourcentage de balles effectivement renvoyées dans le camp adverse, et les résultats sont très prometteurs.
Le projet LATENT ouvre des perspectives intéressantes pour l'avenir de la robotique et de l'intelligence artificielle. Les applications potentielles de cette technologie sont nombreuses, allant des jeux et des sports aux tâches industrielles et aux interventions chirurgicales. Avec des robots capables d'apprendre et de s'adapter rapidement, les possibilités sont infinies.
En conclusion, le projet LATENT est un exemple remarquable de l'avancement de la robotique et de l'intelligence artificielle. Grâce à cette technologie, les robots pourront apprendre et s'adapter rapidement, ouvrant la voie à de nouvelles applications et à de nouvelles perspectives pour l'avenir.